예상보다 베타플라이트에서 펌웨어 업데이트하는 과정에 대한 글이 길어지는 바람에
이번에 베타플라이트 설정에 대한 본격적인 내용을 다루어 보겠습니다.
1. UART 포트 설정하기
- UART는 Universial Asynchronos Receiver Transmitter 의 약자로 범용비동기송수신기라는 뜻입니다.
뭐 기술적인 것은 들어가면 한도 끝도 없으니 그냥 Com port 혹은 Seiral port 정도로만 알아도 조립이나 설정에는 크게 문제가 없습니다.
FC의 설명서나 FC에 써있는 글자들을 보면 TX1, RX1, TX3, RX3 이런식으로 써있는데 이부분이 거의 시리얼 포트입니다.
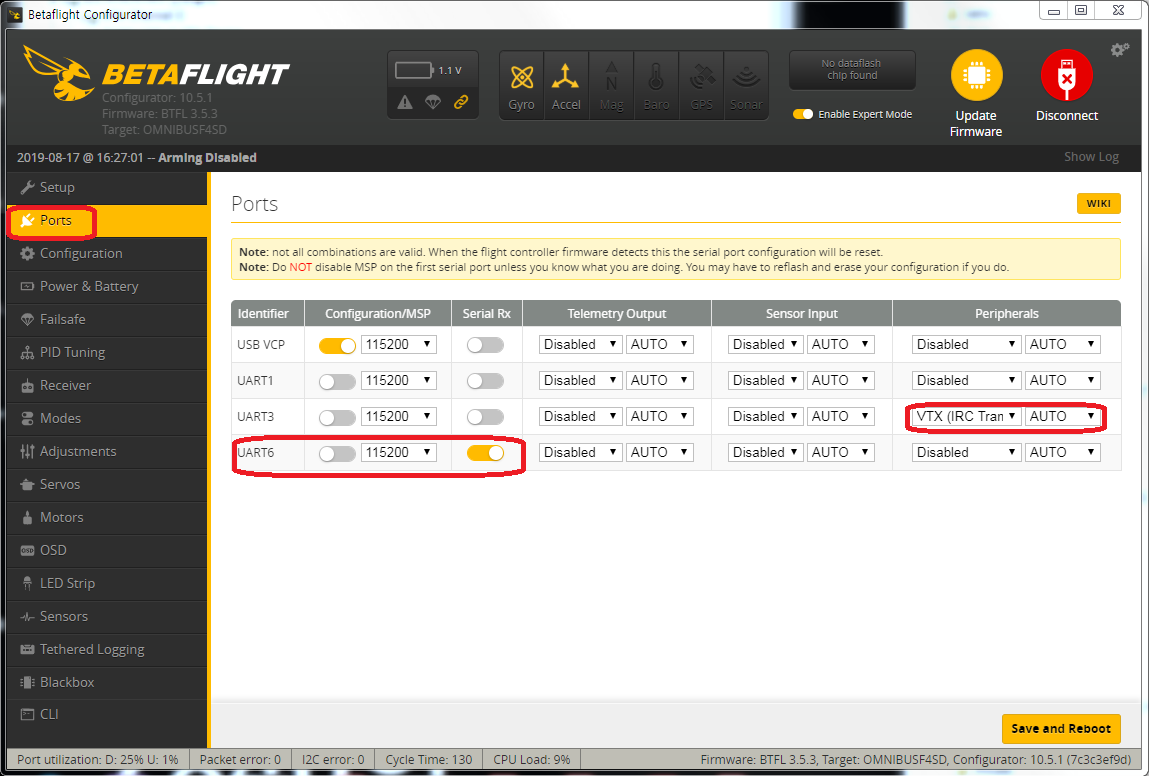
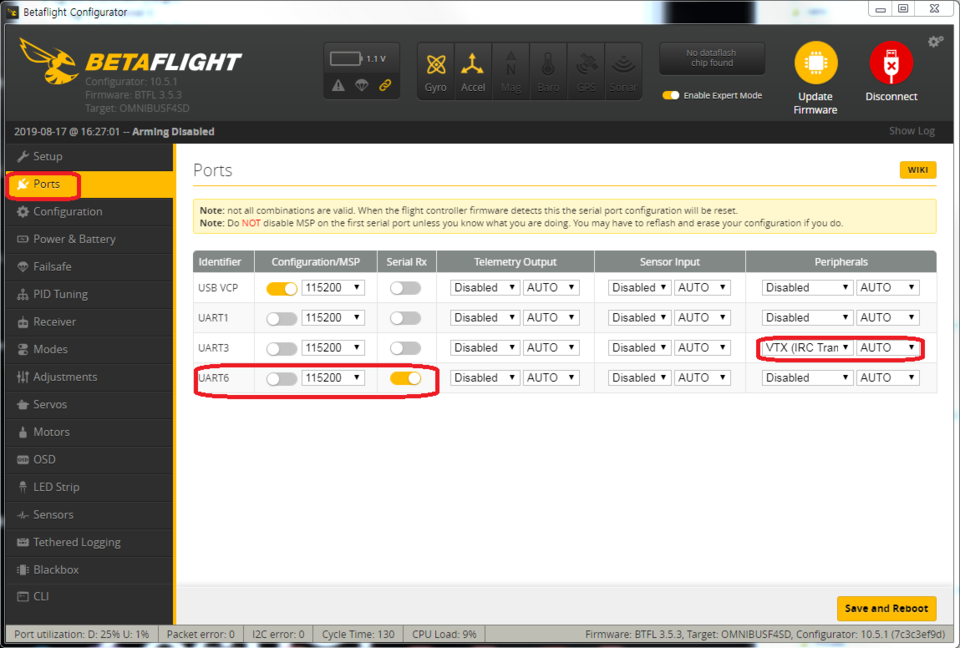
위는 베타플라이트에 접속하고 Ports 탭을 누르면 나오는 화면입니다.
보통 UART VCP 는 FC와 PC를 연결하기 위해 사용하는 포트로 무조건 Configuration/MSP가 활성화 되어 있어야 합니다.
실수로 이부분을 비활성화 시키면 이전 글의 펌웨어 업데이트 모드로 다시 초기화 시키는 방법 밖에 없습니다.
그리고 제가 사용한 FC의 UART 6은 조종기 수신기가 연결된 포트로 Serial RX 부분만 활성화 시켜주면 되고
요즘은 Smart Audio 포트라고 해서 영상송신기(VTX, Video Transmitter)의 설정을 버튼을 누르지 않고 소프트웨어적으로 설정하는 기술이 있는데 그부분에 사용되는 포트가 UART3의 VTX(IRC Tramp) 부분이니 활성화 해두었습니다.
이렇게 설정하고 Save and Reboot 버튼을 누르면 설정을 저장하고 자동으로 리부팅이 됩니다.
리부팅 후 자동으로 Com port가 안잡히는 경우 FC와 PC를 연결한 USB 케이블을 다시 연결해주면 잡히니 테스트 해보시면 됩니다.
2. 기체의 방향 설정하기

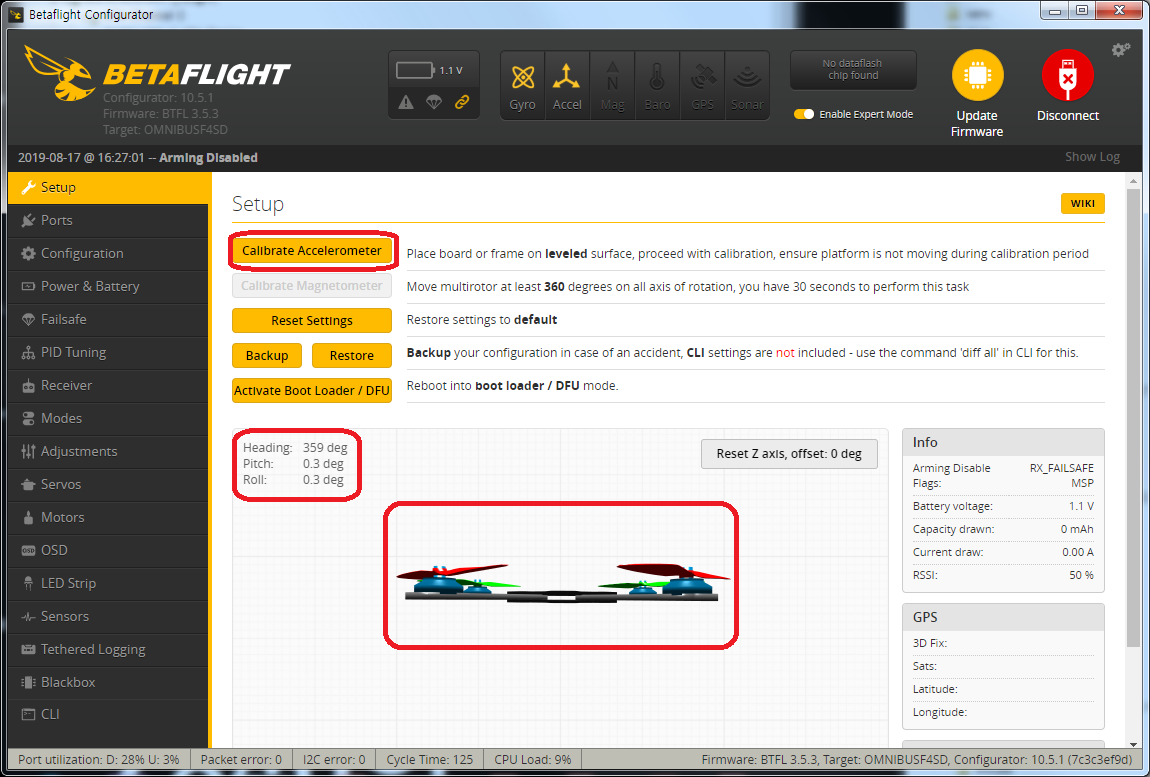
위의 그림은 가속도계 보정(Callibrate Accelerometer) 화면으로 여기서 바로 가속도계 보정을 하는 것이 아니라
기체의 기수를 내가 바라보는 앞면에 두고 손으로 잡고 요리조리 돌려보고 기울여 보았을때 내가 기울이는 방향과 그림의 기체 기울임이 일치하는지 먼저 봐야 합니다.
98벙커의 경우 FC가 180도 뒤집고 또 수평에서 45도 틀어서 거치(마운트) 했기 때문에 원하는대로 움직이지 않습니다.
그런경우 내 FC가 어떻게 마운트 되었는지 설정하는 부분이 있으니 설정을 먼저 잡아줍니다.
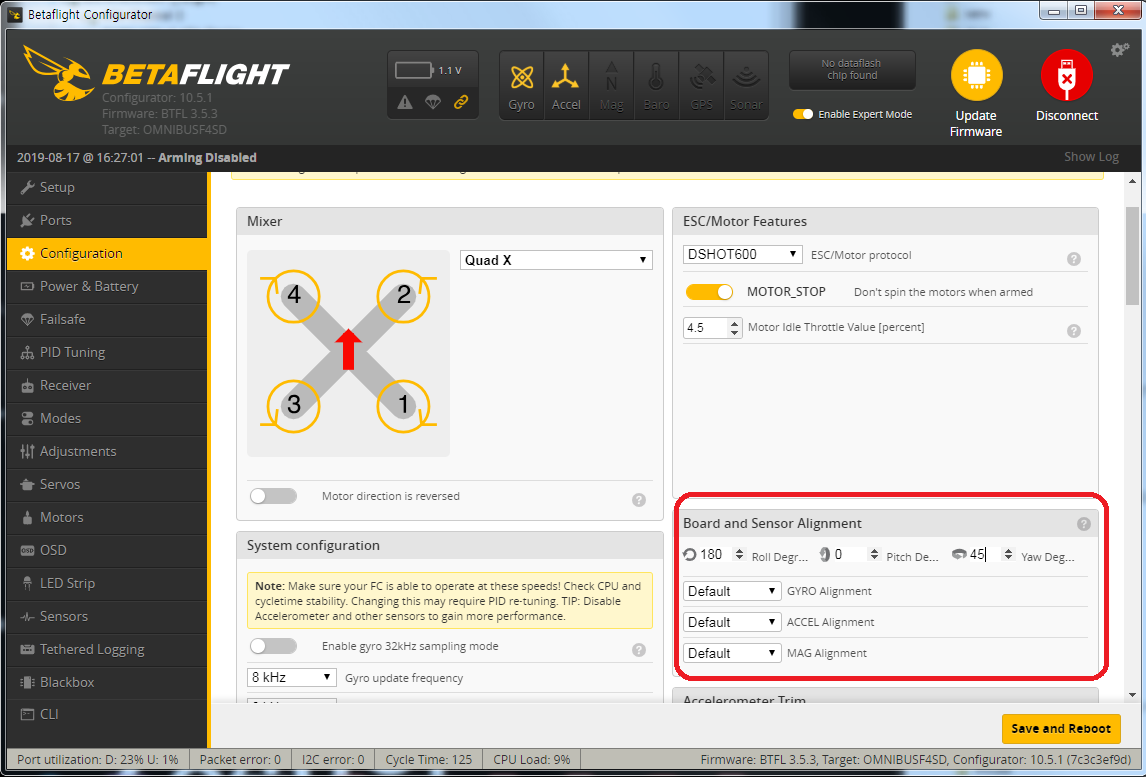
위의 빨간 네모가 FC의 거치 방향을 설정해주어 기체의 방향을 보정해주는 화면입니다.
Configuration 탭에서 Board and Sensor Alignment 항목에
Roll Degree에 180도(좌우 기울기가 180도 뒤집어져있음), Yaw Degree에 45도(수평 방향에서 45도 틀어짐)을 설정하고 Save and Reboot 버튼을 눌러 저장해줍니다.
그리고 나서 다시 Setup 탭에 가서 기체를 돌려보며 그림과 내가 기울이는 것이 일치한다고 하면
기체를 평평한 곳에 수평으로 두고 Callibrate Acceleronmeter 버튼을 눌러줍니다.
그러면 가속도계 보정이 이루어지는데 그러고 나면 Haeding은 0도나 360도에 근접하게 되고 Pitch와 Roll은 0도에 근접하게 됩니다.
진동을 주지 않고 손을 대지 않았는데 몇분 동안 Heading이 돌거나 Pitch나 Roll의 수치가 계속 변하면 뭔가 FC의 센서에 이상이 있는 것으로 펌웨어 버전을 변경해보고 다시 테스트 해보고 안되면 FC 불량으로 판단해봐야 할 수 있습니다.
센서의 이상은 자동으로 수평을 잡아주는 앵글(Angle)모드에서 한쪽으로 지속적인 쏠림이나 회전시 드리프트(Drift)라고 하는 밀림이 발생할 수 있으니 꼭 잡아주는 편이 좋습니다.
에어(Air)모드나 아크로(Acro)모드만 사용할 경우 센서의 개입이 거의 없기 때문에 기울임 값이 변해도 문제가 없지만 저처럼 Angle모드도 즐기는 경우 꼭 확인해봐야 하는 부분입니다.
3. 수신기 설정하기
- 보통 수신기라고 하면 조종기에서 무선으로 보내는 제어 신호를 수신하여 FC에 그 값을 전달하는 역할을 하는 부품을 이야기 합니다.
조종기의 제조사마다 서로 다른 송수신 규격을 사용하므로 자기에게 맞는 송수신기 연결 정보를 설정해주고 조종기의 스틱을 잡지 않았을 때 중립값을 맞춰주는 부분입니다.
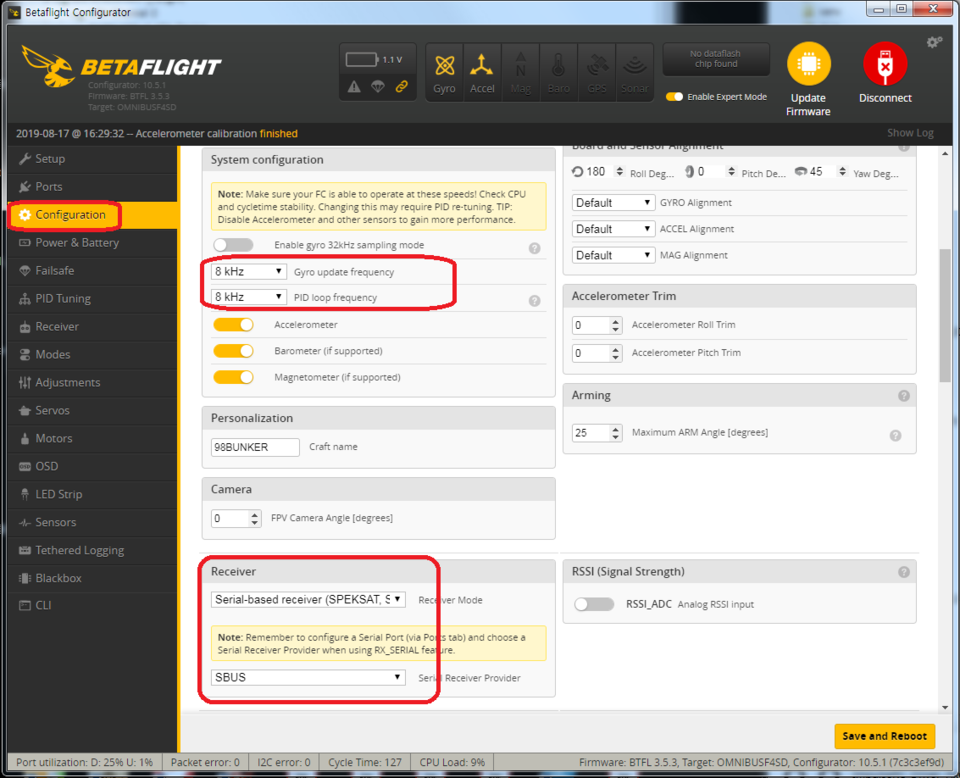
저는 Taranis의 XM+ 수신기를 사용하는데 시리얼방식 통신에 SBUS 규격을 사용하므로
우선 위와 같이 Configuration 탭에가서 Receiver 항목에서 Serial Based Receiver(SPEKSAT, SBUS..) 항목을 선택하고
SBUS를 선택해줍니다.
그리고 Save and Reboot 버튼을 눌러 저장해줍니다.
Configurator 탭에서 설정하는 부분은 모두 Save and Reboot 버튼을 눌러야만 적용이 되는 부분이며
간혹 한번에 많은 정보를 변경하고 저장하면 제대로 저장이 안되는 경우가 있어 귀찮더라도 변경한 부분이 있으면 한번씩 저장해주는 것이 좋습니다.
Serial Based 수신기 방식을 선택했더라도 FC가 어느 UART 포트에 수신기가 연결되었는지 알려주지 않아도 되는 이유는 초반에 아래와 같이 Ports 탭에서 아래와 같이 UART6에 Serial RX를 선택해주었기 때문에 자동으로 UART6에 수신기가 연결되어 있음을 아는 것입니다.
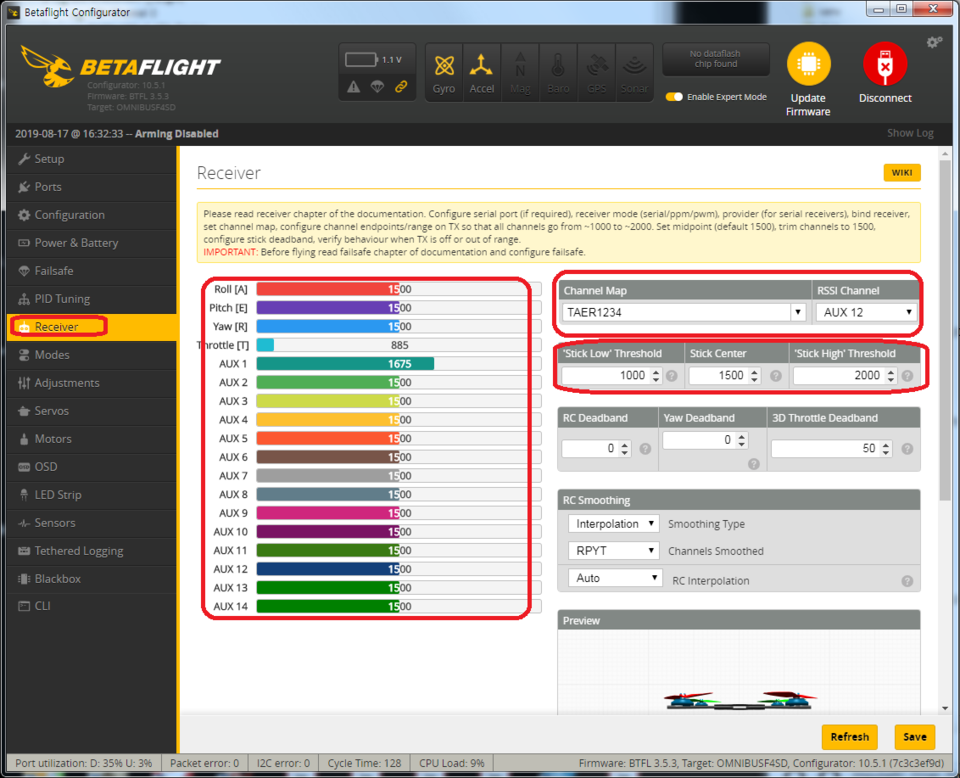
수신기 연결 설정이 잘되었다고 한다면 위와 같이 Receiver 탭에 가서 조종기의 스틱을 움직였을 때 각 부분에 맞게 변해야 합니다.
저는 보통 Stick row(스틱낮음) 한계(Threshold) 값은 1000 중립(Mid)는 1500, 높음한계는 2000으로 놓습니다만 기본 값은 다르므로 자기에게 맞게 쓰면 될 것 같습니다.
저는 MODE2에 스로틀(Throttle)을 1000 밑으로 설정해서 쓰기 때문에 스로틀을 1000~2000 바깥 범위로 움직이게끔 설정해줍니다. 그리고 Roll, Yaw, Pitch 는 중립시 1500을 유지하도록 조종기에서 미세조정(Sub Trim)을 해줍니다.
조종기 설정법은 제조사마다 다르므로 다른 글에서 다뤄보도록 하겠습니다.
일단 기본이 되는 Throttle, Roll, Yaw, Pitch를 맞춰주고 비행모드와 부가기능 모드를 설정하는데 사용되는 AUX 값의 변화가 조종기에 설정한 채널의 번호와 일치한다면 Save 버튼을 눌러 저장합니다.
수신기의 중립값 등을 조정하였으면 비행모드 설정 및 부가기능 설정을 해주어야 합니다.
이 과정은 Modes 탭에서 설정합니다.
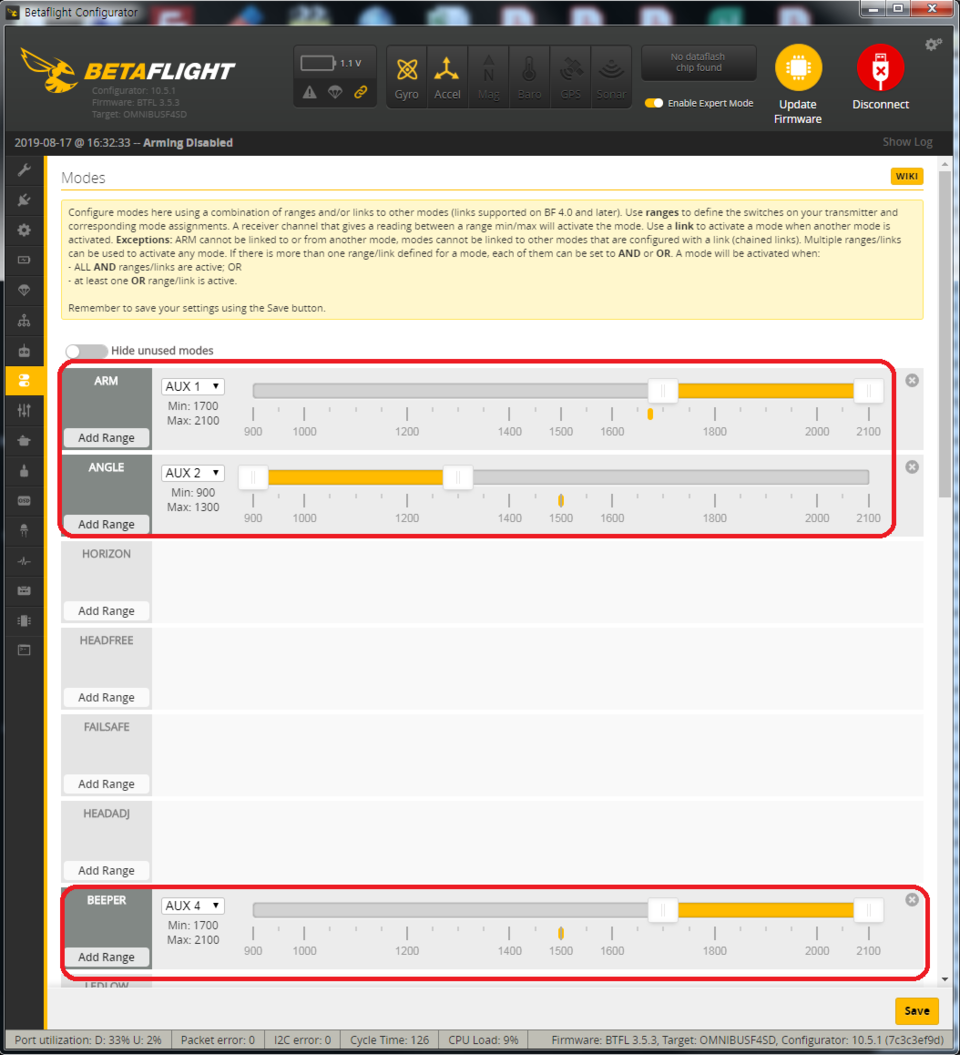

개인마다 다르겠지만 저는 AUX1에 Arming, AUX2에 Angle, Air, Acro Mode 선택, AUX3에 뒤집힌 기체를 바로잡는 일명 터틀모드인 Flip Over After Crash, AUX4에 추락한 기체를 찾는데 소리를 내도록 하여 도움이 되는 Beeper를 설정합니다.
보통 조종기마다 다르지만 조종기는 2구간이나 3구간으로 끊어서 값이 변동합니다. 그래서 각 구간마다 노란색 게이지를 움직여 서로 중복이 되지 않도록 설정해주면 그 구간에 AUX키의 값이 들어가면 기능이 활성화 되는 원리입니다.
이번에도 글을 쓰다보니 한 글에 다 담지 못해서 나누게 되었네요.
다음에는 모터테스트와 OSD 설정 부분에 대해서 다뤄보겠습니다.
'Drone' 카테고리의 다른 글
| 카메라용 짐벌(Gimbal) 1축 2축 3축 짐벌 영상차이 (0) | 2019.08.23 |
|---|---|
| 3DM 98Bunker 제작기(6)-베타플라이트 설정하기2 (0) | 2019.08.23 |
| 3DM 98Bunker 제작기(4)-베타플라이트 펌웨어 업데이트 (0) | 2019.08.23 |
| 3DM 98Bunker 제작기(3)-조종기 수신기, Camera 연결하기, 하판과 결합하기 (0) | 2019.08.23 |
| 3DM 98Bunker 제작기(2)-FlyTower Stack 쌓고 주변기기 연결하기 (0) | 2019.08.23 |